1
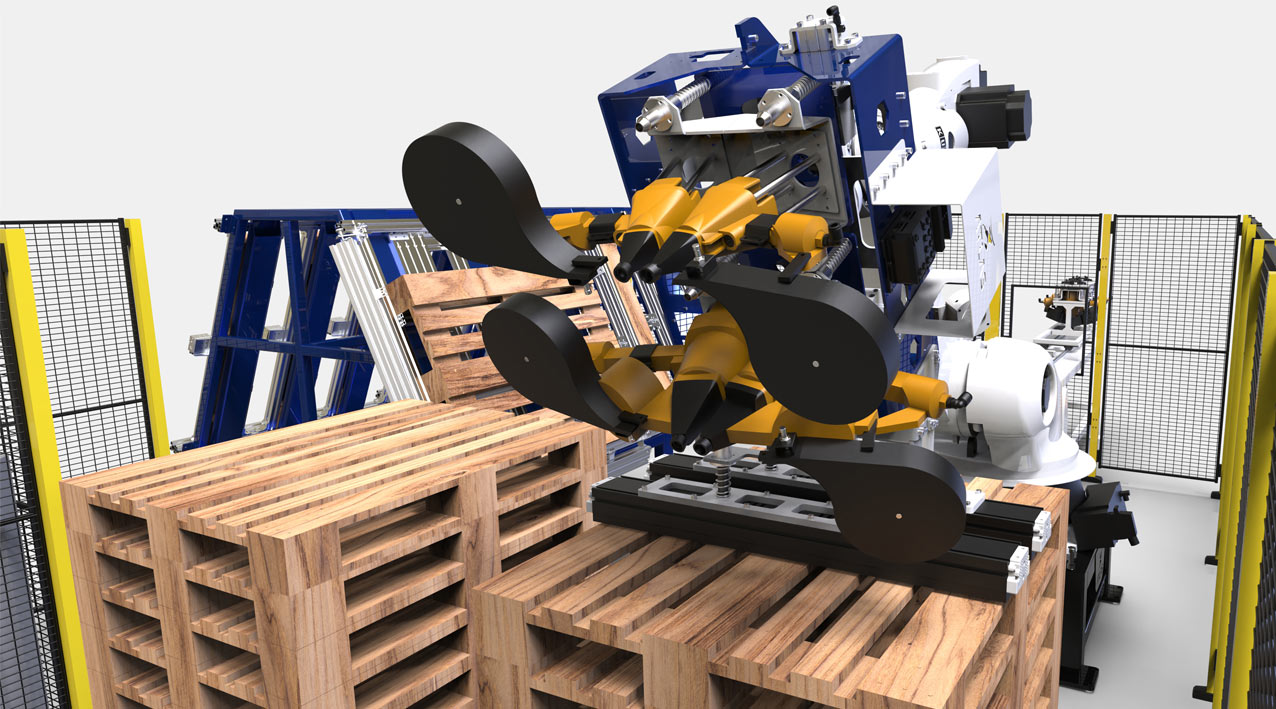
The robot is able to place an empty pallet in the initial loading position and, once completed, automatically replenish it. When the full pallet leaves the cell, the robot captures a new empty pallet and accurately positions it to start the next palletizing cycle.
2
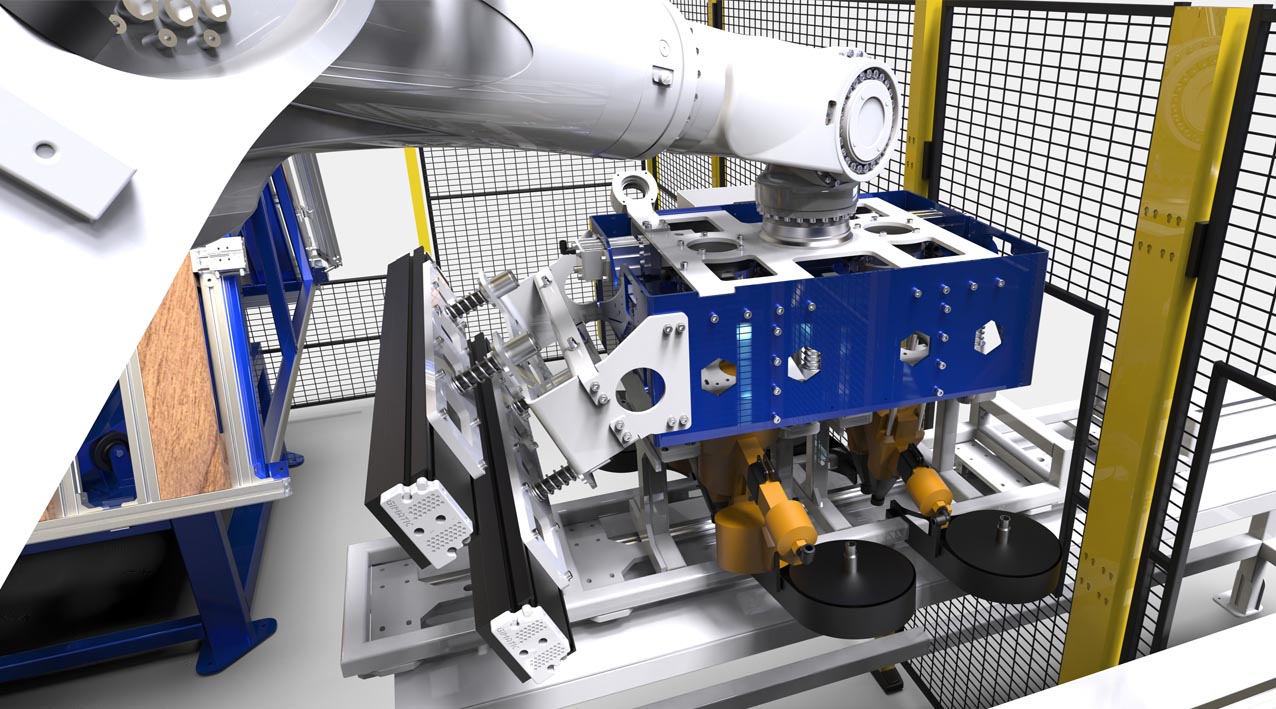
The robot is able to place an empty pallet in the initial loading position and, once completed, automatically replenish it. When the full pallet leaves the cell, the robot captures a new empty pallet and accurately positions it to start the next palletizing cycle.
3
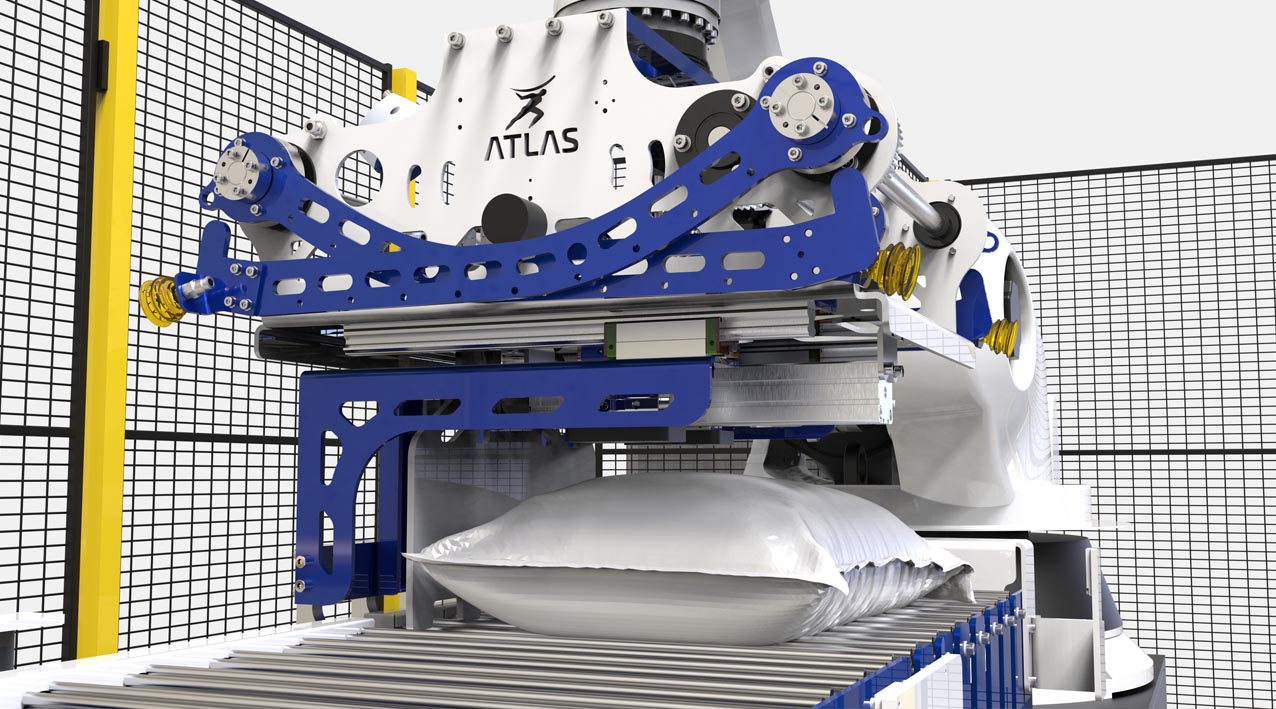
The robot is able to place an empty pallet in the initial loading position and, once completed, automatically replenish it. When the full pallet leaves the cell, the robot captures a new empty pallet and accurately positions it to start the next palletizing cycle.